Controlling microscopic processes is inherently challenging. The everyday tools we use to manipulate matter on the macroscale can’t simply be shrunk down to the size of cell, and even if they could, the physical forces they rely on work differently when their targets are measured in nanometers. But while it’s no easy feat, attaining this type of control would pay enormous dividends: whether it’s transporting drugs to tumors for precise therapies, or making functional materials out of the liquid-suspended building blocks known as colloids, Penn Engineers are working to make these processes faster, safer and more reliable.
One approach for controlling these processes is through the use of microrobots.
We typically think of robots as computerized machines like those on assembly lines or in warehouses, programmed to move cargo and to build complex structures like automobiles and cellphones. However, programming a machine smaller than a microchip presents another kind of challenge. Too small for computerization, robots on this scale need to be designed in a completely different way — and adhere to completely different sets of physical and chemical laws — than their bigger counterparts.
Since they’re too small for their own onboard computers, microrobots move about by means of an external magnetic force. And to manipulate equally small cargo, they need to take advantage of the different physical and chemical laws that rule the microscale.
At those sizes, every object is greatly influenced by the molecules surrounding it. Whether they are surrounded by gas, like the ambient atmosphere, or immersed in a liquid, microrobots must be designed to exploit this influence through a concept known as “physical intelligence.”
By understanding the system, the surrounding media and the particles within it, physically intelligent microrobots can perform diverse tasks.
Kathleen Stebe, Richer & Elizabeth Goodwin Professor in Chemical and Biomolecular Engineering and Mechanical Engineering and Applied Mechanics, Tianyi Yao, a former Ph.D. student in her lab, Qi Xing Zhang, a current Ph.D. student, and collaborators in the group of Professor Miha Ravnik at the University of Ljubljana are conducting fundamental research that will lay the groundwork for understanding these small-scale interactions in a colloidal fluid of nematic liquid crystals (NLCs), the fluid that makes up each pixel in a liquid crystal display (LCD) screen.
“Nematic liquid crystals exist as a special phase, a structured fluid that is neither liquid nor solid,” says Stebe. “NLCs consist of elongated molecules that self-align in a configuration that requires the least amount of energy. Think of shaking a pan of rice; the grains all align. When you disturb the nematic alignment by introducing microrobots or colloidal cargo, you get really interesting dynamics that you don’t see in water, for example. It is the physics of NLCs that allow us to investigate these unique interactions.”
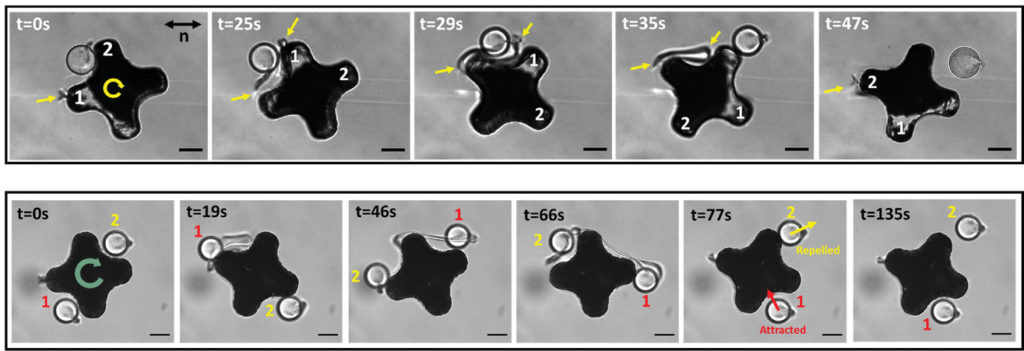
In one study, published in Advanced Functional Materials, the research team describes a four-armed, magnetically controlled microrobot that can swim, carry cargo and actively restructure particles in this complex fluid.
“We started with a complex shape, which produced complex behaviors,” says Stebe. “Here, the microrobot is being controlled by an external magnetic field and is using its physical intelligence to pick up a microparticle as cargo, then it bats it around as it swims to the textured surface. The grooves in the surface material are the perfect size to attract and hold the particle. In fact, it was that surface design that inspired the design of the four-armed microrobot. We took advantage of the physical shape, surface chemistry and special dynamics of the colloid in NLCs to control it.”
“But, the more we observed these sophisticated functions, the more we didn’t understand,” she adds. “We had to turn back to the fundamentals to actually explain what was going on here.”
How was this robot able to swim? How was it able to hold and move particles? In another study, published in Science Advances, the team answered those questions with a microrobot of a simpler shape.
“The disk shape allowed us to better understand the microbot’s swimming ability,” says Stebe. “Here we can see that as one side of the disk tilts upwards, there is a topological defect that is created underneath it. The interaction between the topological defect and the disk itself creates an energy gradient that allows for self-propulsion of the disk.”
The reason for the topological defect which allows for the swimming function of the robot is because of the complex organization of the NLCs, which differs dramatically from disorganized liquids like water.
“Using physics of nematic liquid crystals,” says Yao, the lead author of both studies, “we can build physically intelligent microrobotic systems. We can make long-range interactions, tune binding strengths and reconfigure the space. While we have proven these interactions on the microscale, the prevailing physics are also effective on very small scales, on the order of 30–50 nanometers.”
Being able to manipulate processes on this level is groundbreaking, and understanding how robotic systems are able to perform tasks in an indirect way, considering the fluid dynamics and physical interactions of the media as a part of the microrobot’s design, is key.
Stebe and her team are now able to imagine real-world applications for this technology in the optical device industry as well as many other fields. Smart materials, aware of their environment, may be designed using temperature and light as controls for microrobotic tasks.
“Together with dedicated colleagues and graduate students, we have been working hard on this technology, and are excited to see years of work come to fruition,” she says. “We are now standing on the edge of real applications and ready to explore.”