ModLab’s ‘SMORES’ Modify Their Environment to Get the Job Done
Given the exact parameters of the task at hand, a robot can assemble a car door or pack a box faster and more efficiently than any human, but such purpose-built machines aren’t good for much else.
With that in mind, the history of robotics research is marked by devising ways of giving machines more and more autonomy. To achieve that end, robots must be able to sense features of never-before-seen environments and know how to they can be interacted with.
ModLab, directed by professor Mark Yim and based at PERCH, is interested in the way robots can adapt to their surroundings and solve problems they weren’t explicitly programmed to be prepared for.
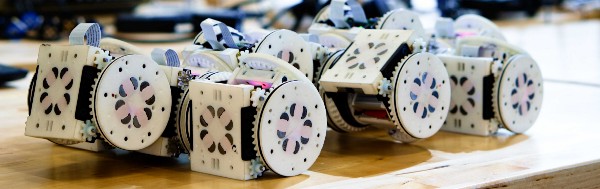
Its latest project, presented at last month’s International Conference on Robotics and Automation, is based on its SMORES-EP modular robots. Individually, each module can’t do much but roll around on wheels protruding from its cubic frame. But thanks to electro-permanent magnets on those wheels and a hinged face, modules can connect to one another and achieve more complex behaviors, pick up and integrate sensor-carrying components, and manipulate metal objects.
In a new paper, published on the ArXiv, the ModLab team demonstrates how this system can make sense of objects in its environment and use them to complete a given task, such as searching the drawers of a filing cabinet.
At IEEE Spectrum, Evan Ackerman reported on their research:
For example, modular robots can have trouble dealing with crossing gaps or climbing up stairs or ledges, because modular robots don’t scale well beyond a handful of individual modules. Rather than trying to find a way for the robot to handle obstacles like these, the UPenn researchers decided to teach the robot to modify its environment by giving it access to blocks and ramps that it could (autonomously) use to make obstacles less obstacle-y.
This behavior is completely autonomous: The system is given a high-level task to accomplish, and the ramps and blocks are placed in the environment for it to use if it decides that they’d come in handy, but it doesn’t have explicit instructions about what to do every time.
While the objects that the SMORES-EP modules use to complete their tasks are currently labeled with markers to make them easier to find and recognize, the ultimate goal of the project is to enable robots to use whatever is at hand to get the job done.
Continue reading about SMORES-EP at IEEE Spectrum.