Cockroaches Give Undergrads a Leg Up in Designing Biomechatronic Prostheses
When ABC premiered The Six Million Dollar Man more than 40 years ago, the idea of replacing or augmenting human limbs with fully functional mechanical versions probably seemed a distant possibility. In fact, the concept had already been in development for decades, but research in this area is only now coming to fruition. Three years ago, researchers in Chicago reported in the New England Journal of Medicine that they had fitted a 31-year-old amputee with a robotic leg that the patient could control with electromyographic, or EMG, signals from salvaged nerves.
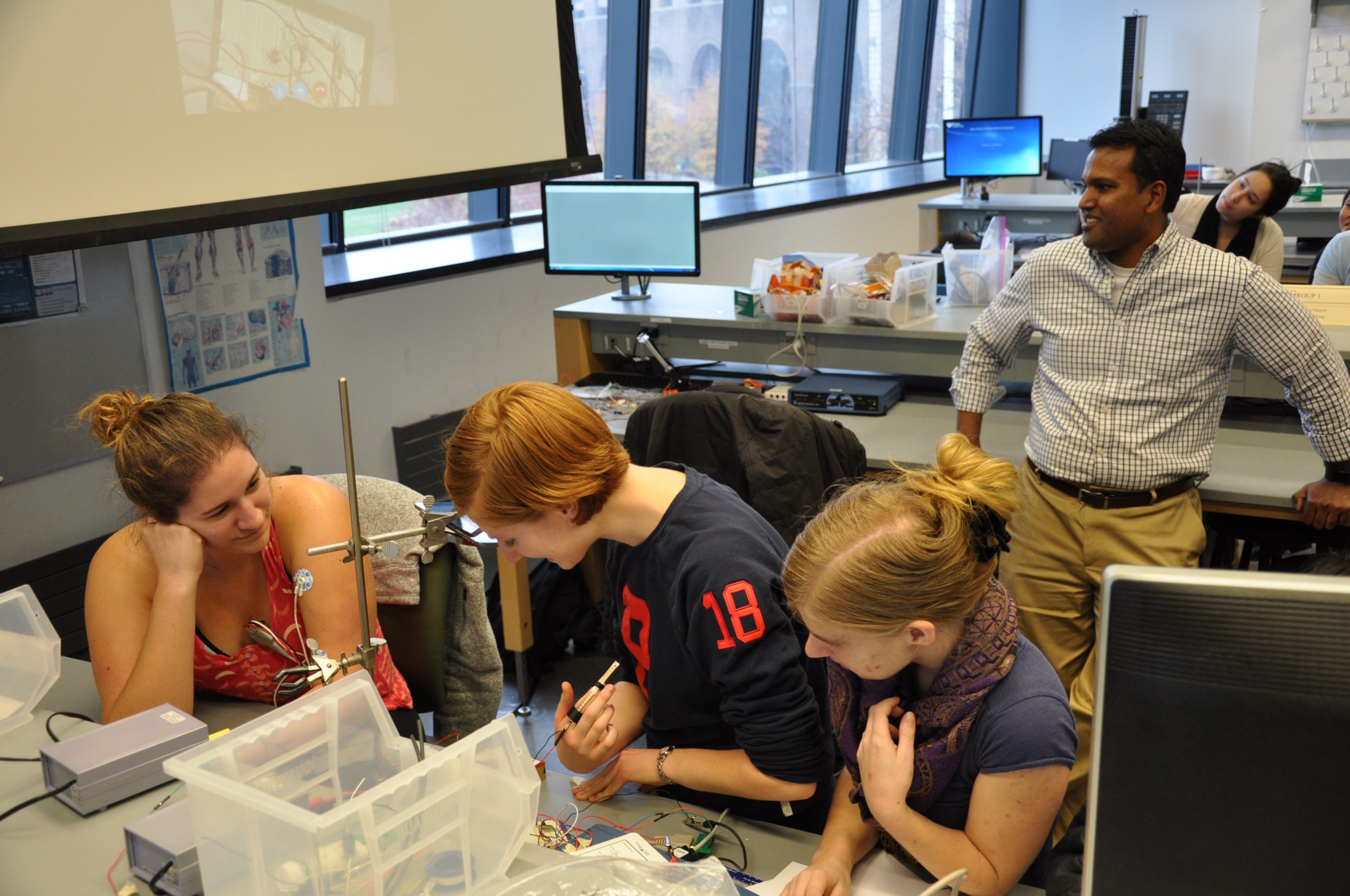
Reflecting these developments, undergraduate students in the Department of Bioengineering (BE) have spent the last few weeks developing their own prosthetic devices, although both the mechanics and the “patient” are a bit cruder. Over the course of five lab sessions, these students are creating an “HCMI” — a human-cockroach machine interface that can translate an individual’s own nerve signals into ones that can control a cockroach leg.
The students performing these experiments are enrolled the first of two lab courses that BE students take as juniors. In the George H. Stephenson Foundation Undergraduate Bioengineering Laboratory, the students spend the first few sessions familiarizing themselves with cockroach anatomy. Each group then attaches an individual cockroach leg to a mechanical motor interface, creating a biomechatronic prosthesis, i.e., one that combines electronic, mechanical, and biological systems.
This part of the experiment was considered successful when the students were able to write the letters “BE” with the cockroach leg, using signals generated by computer. This is a more difficult task than it might seem, both because each cockroach leg responds at slightly different frequency-voltage ranges.
Why a cockroach leg?
“They’re easily attainable and easy to deal with,” says Sevile Mannickarottu, who is director of the Stephenson lab. “They’re also relatively large, which makes accessing their legs easy.”
The cockroach’s nervous system is also much simpler than those of birds or mammals, thus simplifying the process of creating the HCMI.
Once the students can write with the biomechantronic device, the final step of the experiment begins. Using human input, students are required to combine two devices to move the prosthetic. One of the devices is an EMG electrode; the other device is up to the student, and it can be a microphone, a motion sensor, or a range of other devices. Working directly with EMG signals is a challenge according to Mannickarottu, who described it as “incredibly noisy and difficult to interpret into meaningful data.”
After choosing their human input device, students send the signals from the device to a computer, which then converts the signal into an EMG signal, which is sent back out to the prosthetic leg. The students tried several different approaches to get the leg to move, including a musical keyboard, a force sensor, and a flex sensor. One group chose to use a Myo armband, a gesture recognition device produced by Thalmic Labs that is commonly used for video games.
With human prostheses and brain-machine interfaces rapidly advancing, overcoming a bit of entomophobia was a worthwhile endeavor for these undergrads.