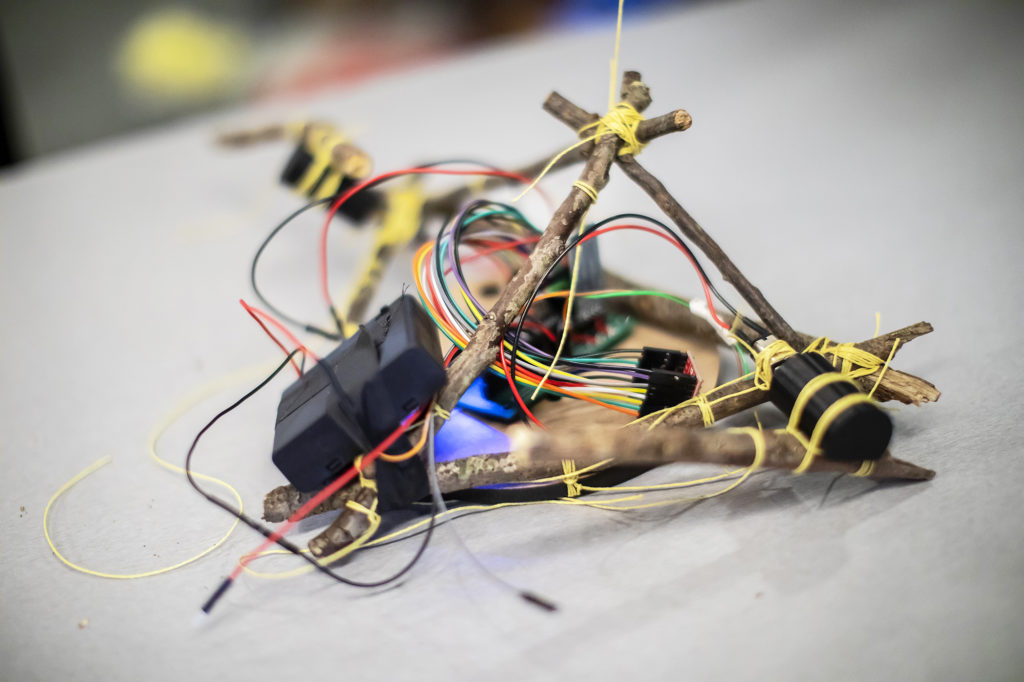
When Devin Carroll, a Ph.D. candidate in Penn Engineering’s General Robotics, Automation, Sensing & Perception (GRASP) Lab, walks the streets of Philadelphia, he keeps an eye out for the best sticks to add to his modular robot. Composed of circuitry, actuators, a microcontroller, and a motor driver, Carroll has dubbed the creation StickBot.
As a modular robot, the StickBot is a versatile system consisting of many simple modules that can change their configuration to suit a given task: its components can be adapted, added and taken away as needed. In this case, the modules of the StickBot consist of wooden sticks, it runs on four AA batteries, and it is connected by a maze of wires and blinking lights.
Controlling the robot using an app he designed, Carroll can demonstrate how StickBot can pivot from using the sticks as legs in “crawler mode,” to using them as arms. In “grasper mode,” the sticks are attached to a controller plate on one side to form a hinge joint while moving with their free end to hold a cup upright.
In addition to efficient adaptability, being able to hit the streets to source one of StickBot’s key components makes accessibility another strong asset.
“StickBot is a robotic system that is intended to provide users with a large amount of flexibility at an extremely low cost and we do that by leveraging the modularity of found materials,” says Carroll. “We have a bunch of tree branches or sticks and we’re able to assemble them into truss structures in different configurations. In doing so, we can get things like a crawler robot or a gripper robot or really, anything you can imagine. Behind StickBot is the ability to reconfigure things and to make it extremely affordable.”
Potential practical uses for the StickBot include in therapeutic or assistive health settings, especially in resource-constrained places where replacement parts might be hard to come by.
Read “A robot made of sticks” and watch a video of StickBot in action at Penn Today.