Bioinspiration, the practice of using biological models as guides for materials, structures or systems, is becoming an increasingly prominent practice in research labs as the engineering demand for strong, multifunctional and adaptable materials has exploded.
Among the researchers looking towards the natural world is Jordan Raney, Assistant Professor in Mechanical Engineering and Applied Mechanics, who is developing a way for robots to respond to their environments using properties that are built into the materials they’re made of.
Take, for example, the Venus flytrap. The carnivorous plant can snap shut when potential prey touches the hypersensitive hairs inside its leaves. Even more interesting is the fact that the Venus flytrap appears to be able to reopen when it catches something inedible. The plant has no brain or central nervous system, which makes this level of complex functioning noteworthy.

Now, through a new DARPA Young Faculty Award, Raney will build on these ideas to produce materials with “distributed intelligence.” By combining their mechanical logic gates into more complex arrangements, these materials may allow new capabilities in unconventional robots.
“In our previous work, we combined nonlinear mechanical mechanisms with stimuli-responsive materials to produce simple logic gates that evaluate and respond to their environment,” Raney says. “In this new project, we will utilize those principles but in larger-scale systems with many more such evaluations. These evaluations could be used, for example, to steer a robot away from a hazard, such as high temperatures, or toward a goal without a traditional control system.”
Rather than relying on traditional sensor systems that route information to a central processor that decides how to respond to the environment, robots with distributed intelligence could perform this sort of computation by relying on the geometry and composition of the materials composing the system.
Raney’s research will make use of advanced 3D printed materials to build these structures, such as silicones to sense solvents, hydrogels to sense water and liquid crystal elastomers to sense temperature and light. Printing allows these to be spatially controlled and make them a viable candidate for building flexible robots that can change shape and function when programmed conditions are met, such as a certain temperature increase or decrease.
For example, if a material is programmed to shift at a certain temperature increase, two pieces can be combined, one of which is longer than the other. When surrounding temperature rises, one piece may shrink while the other remains stable, thus causing the two-piece object to bend. These kinds of actions can be optimized to perform tasks, such as opening a hatch or flicking a switch. In this way, Raney’s 3D printed systems with distributed logic and intelligence can be used in flexible, autonomous robots that perform functions in response to their environment.
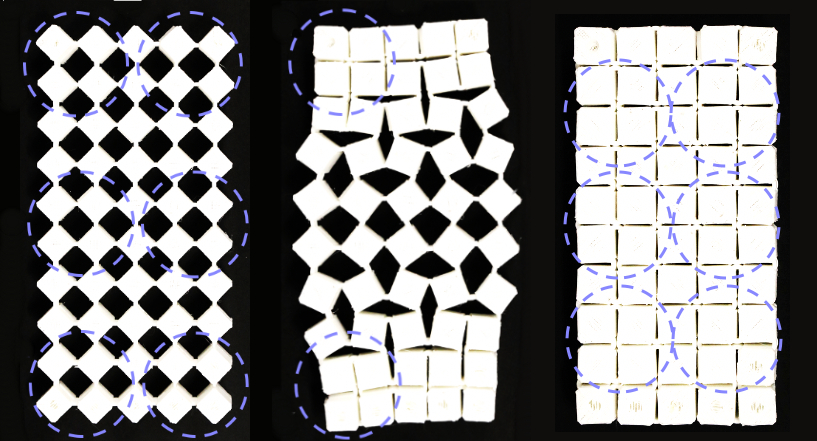
This shape-shifting ability is inspired by kirigami, a version of origami that involves cutting paper as well as folding it. Raney chose to study kirigami and its applications in microrobots because kirigami structures are scale-independent, meaning that the process of morphing a 2D material into a 3D object using cuts and folds can in principle be reproduced at any scale.
While the research group says they are far away from potential applications, this grant funding will enable Raney’s group to do high-risk investigation of their “sci-fi” ideas.
“One of the exciting promises of this work is that, just like biology, the lines between materials and computation are blurred,” Raney shares. “We are building systems on centimeter scales, which is relatively large, and focusing on studying feasibility. However, it is worth noting that the effects we are leveraging are scale-independent. Nothing in principle limits these ideas from being miniaturized to micron scales. In fact, realizing these phenomena at smaller length scales, where they may be exploited in novel robotic systems, is one of the later goals of the project.”