Mark Yim, Asa Whitney Professor of Mechanical Engineering, has seen any number of innovative robots walk, fly, hop, roll and otherwise propel themselves about the GRASP Lab, where he serves as Ruzena Bajcsy Director. But the lab’s latest creation is, quite literally, its coolest yet: it’s made out of ice.
ModLab, Yim’s own group within the GRASP Lab, focuses on modular robotic systems. These robots can reconfigure themselves on the fly to adapt to new environments or tasks. Some are composed of identical units that can link up in different ways, such as the flying ModQuads or rolling SMORES-EP, but what happens when those units are themselves not suited to a given job?
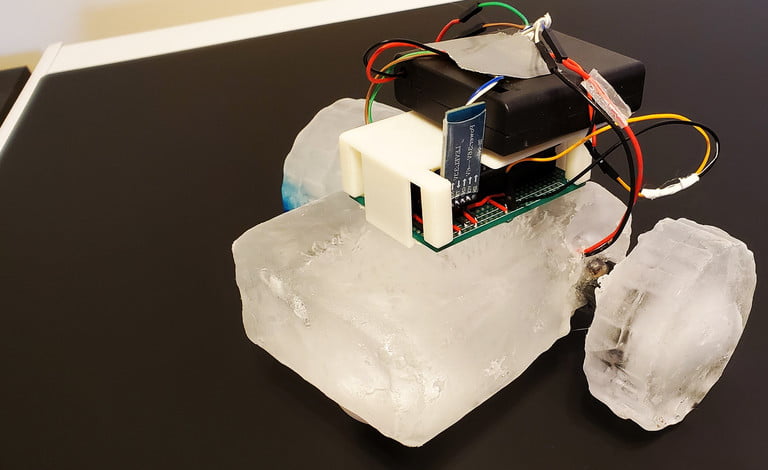
Working alongside Yim, graduate student and ModLab member Devin Carroll recently proposed an innovative solution: making those units out of blocks of ice. Such a robot could be deployed to the antarctic or even an icy extraterrestrial planet, two places where custom parts or repairs would be especially hard to come by.
Evan Ackerman at IEEE Spectrum recently reported on the proof-of-concept bot:
In a paper presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Devin Carroll and Mark Yim from the GRASP Lab at the University of Pennsylvania, in Philadelphia, stress that this is very preliminary work. They say they’ve only just started exploring the idea of a robot made of ice. Obviously, you’re not going to be able to make actuators or batteries or other electronics-y things out of ice, and ice is never going to be as efficient as a structural material as titanium or carbon fiber or whatever. But ice can be found in a lot of different places, and it’s fairly unique in how it can be modified—heat can be used to cut and sculpt it, and also to glue it to itself.
The IROS paper takes a look at different ways of manufacturing robotic structural components from ice using both additive and subtractive manufacturing processes, with the goal of developing a concept for robots that can exhibit “self-reconfiguration, self-replication, and self-repair.” The assumption is that the robot would be operating in an environment with ice all over the place, where the ambient temperature is cold enough that the ice remains stable, and ideally also cold enough that the heat generated by the robot won’t lead to an inconvenient amount of self-melting or an even more inconvenient amount of self-shorting. Between molding, 3D printing, and CNC machining, it turns out that just cutting up the ice with a drill is the most energy efficient and effective method, although ideally you’d want to figure out a way of using it where you can manage the waste water and ice shavings that result so that they don’t refreeze somewhere you don’t want them to. Of course, sometimes refreezing is exactly what you want, since that’s how you do things like place actuators and attach one part to another.
Continue reading Ackerman’s reporting and an interview with Carroll at IEEE Spectrum.